
- Enseignant: Amel GOURI
This course provides a comprehensive and structured introduction to classical control theory for continuous-time linear systems, with an emphasis on mathematical modeling, dynamic analysis, and basic controller design techniques. It begins by introducing fundamental system representation methods, including differential equations, state-space models, block diagrams, and transfer functions, which serve as essential tools for describing and analyzing automated systems.
The course explores system response analysis in both the time domain and the frequency domain, addressing key performance characteristics such as stability, damping, rise time, settling time, overshoot, and steady-state accuracy. Students learn how to apply the Laplace transform to evaluate system behavior and are introduced to major graphical analysis techniques such as Bode plots, Nyquist diagrams, and Root Locus methods—core tools used by engineers to assess performance and ensure system stability.
In the design component, the course covers a range of classical controllers, including the Proportional (P), Proportional-Integral (PI), and Proportional-Integral-Derivative (PID) controllers, as well as phase-lead and phase-lag compensators. Students learn how to select controller parameters, understand their influence on system dynamics, and evaluate design trade-offs based on performance specifications.
The course also develops the student’s ability to apply engineering methodologies to build stable and efficient control systems, bridging theoretical concepts with practical examples drawn from real-world mechanical, electrical, and thermal systems. Throughout the course, students are encouraged to strengthen analytical thinking and problem-solving skills, using mathematical tools and specialized software when appropriate.
By the end of the course, students will be able to:
· Construct accurate mathematical models of continuous linear systems
· Analyze system dynamics and assess stability and performance
· Design basic and intermediate controllers to improve automated system behavior
· Apply learned concepts to real engineering systems across various domains
- Enseignant: Noreddine CHOUG
- Enseignant: Aissa BOUDILMI
- Enseignant: Khaled HAMIDI
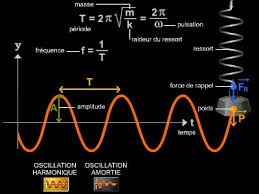
This module presents a global description of the different formalisms of different systems governed by a single and double generalized coordinate (qi), oscillating in the absence and/or the presence of any excitation force.
- Enseignant: Yousf islem BOUREZG
- Enseignant: Hiba AZZEDDINE
- Enseignant: Oussama ZEGHBA
- Enseignant: Badis BAKRI
- Enseignant: Hani BENGUESMIA